四轮驱动机器人底盘设计模型的全方位解析
四轮驱动机器人底盘设计模型是现代机器人技术中的关键组成部分,它不仅决定了机器人的运动性能,还影响着其在复杂环境中的适应能力。本文将从设计原则、结构组成、驱动方式及实际应用等方面,系统阐述四轮驱动机器人底盘的设计模型。
一、设计原则与目标
四轮驱动机器人底盘设计的核心原则包括稳定性、灵活性和负载能力。稳定性确保机器人在各种地形上保持平衡,灵活性使其能够实现转向和避障,而负载能力则关系到机器人能否携带必要的传感器和设备。设计时还需考虑能源效率、制造成本和维护便捷性。
二、结构组成分析
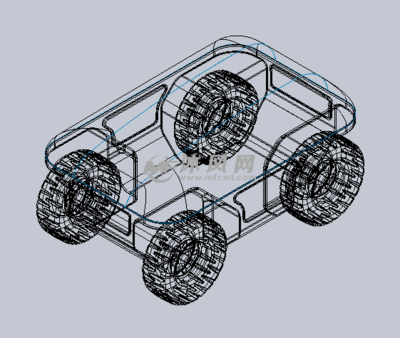
一个典型的四轮驱动机器人底盘模型由以下部分组成:
- 底盘框架:通常采用轻质高强度的材料,如铝合金或碳纤维,以减轻整体重量并提高耐用性。
- 驱动系统:包括四个独立电机,每个电机驱动一个轮子,实现全轮驱动。这种设计可提供更好的牵引力和扭矩分配。
- 悬挂系统:为适应不平坦地形,底盘可能集成悬挂装置,如弹簧或减震器,以减少震动对电子元件的影响。
- 转向机制:四轮驱动底盘常采用差速转向或独立轮转向,通过控制轮速差异实现灵活转向。
- 动力源:电池组是常见的能源,设计时需平衡容量与重量,确保机器人续航时间。
三、驱动方式与技术细节
四轮驱动模型通常采用电子差速或全轮独立控制技术。电子差速通过软件算法调整各轮转速,避免在转弯时发生打滑;而独立控制则允许每个轮子单独响应指令,提升在泥泞、沙地等复杂地形的通过性。模型设计需集成编码器和传感器,实时监控轮速和位置,实现精准控制。
四、实际应用与优化建议
四轮驱动机器人底盘广泛应用于救援机器人、农业自动化、军事侦察和工业巡检等领域。例如,在救援任务中,其高牵引力可帮助机器人穿越废墟;在农业中,能适应崎岖田地。设计优化时,建议采用模块化结构,便于升级和维护;同时,结合仿真软件进行虚拟测试,以降低开发风险。轻量化设计和智能能源管理可进一步提升性能。
四轮驱动机器人底盘设计模型是一个多学科融合的工程,涉及机械、电子和软件技术。通过合理的设计,它可以显著提升机器人的整体效能,为未来自动化应用奠定基础。在实际开发中,团队应注重测试与迭代,以确保模型在真实环境中的可靠性。
如若转载,请注明出处:http://www.bianshy.com/product/13.html
更新时间:2026-02-25 09:15:50