六轴机械臂机械手模型设计及其关键技术分析
六轴机械臂机械手是工业自动化领域中的核心设备之一,具备高度的灵活性和精度,广泛应用于装配、焊接、搬运等任务。本文将从设计目标、结构组成、关键技术和应用前景四个方面,探讨六轴机械臂机械手的模型设计。
一、设计目标
六轴机械臂机械手的设计旨在实现高精度、高负载能力和灵活运动。设计目标包括:1) 实现六个自由度的运动控制,覆盖工作空间的任意位置和姿态;2) 确保结构刚度和轻量化,以提升动态性能;3) 优化驱动和传动系统,保证稳定性和寿命;4) 集成传感器和控制系统,实现智能操作。
二、结构组成
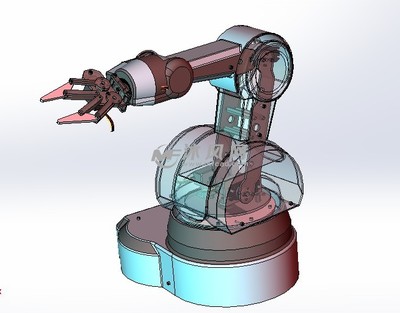
六轴机械臂机械手通常由以下部分组成:1) 基座:作为固定支撑,连接外部设备;2) 六个关节:包括旋转关节和移动关节,每个关节对应一个自由度,采用伺服电机或液压驱动;3) 连杆:连接各关节,采用高强度材料如铝合金或碳纤维,以减轻重量;4) 末端执行器(机械手):根据任务需求设计,例如夹爪、吸盘或工具接口;5) 控制系统:包括控制器、编码器和通信模块,负责运动规划和实时反馈。
三、关键技术
在模型设计中,关键技术涉及多个方面:1) 运动学与动力学分析:通过正运动学计算末端位置,逆运动学求解关节角度,并利用动力学模型优化加速度和力矩;2) 材料选择与结构优化:采用有限元分析(FEA)进行应力模拟,确保在负载下不变形;3) 驱动系统设计:选用高性能伺服电机和减速器,提高精度和效率;4) 控制算法:应用PID控制、轨迹规划或机器学习方法,实现平滑运动和避障;5) 仿真与测试:使用软件如ROS或SolidWorks进行虚拟仿真,验证设计可行性。
四、应用前景
随着工业4.0和机器人技术的发展,六轴机械臂机械手在制造业、医疗和物流等领域前景广阔。未来设计趋势包括:1) 模块化设计,便于定制和维护;2) 集成AI和物联网,实现自适应操作;3) 轻量化和节能化,降低运营成本。通过持续创新,六轴机械臂机械手将进一步提升自动化水平,推动产业升级。
六轴机械臂机械手的模型设计是一个综合性工程,需要平衡机械、电子和软件要素。通过科学的分析与优化,可以开发出高效可靠的设备,满足多样化的工业需求。
如若转载,请注明出处:http://www.bianshy.com/product/15.html
更新时间:2026-02-25 01:01:48